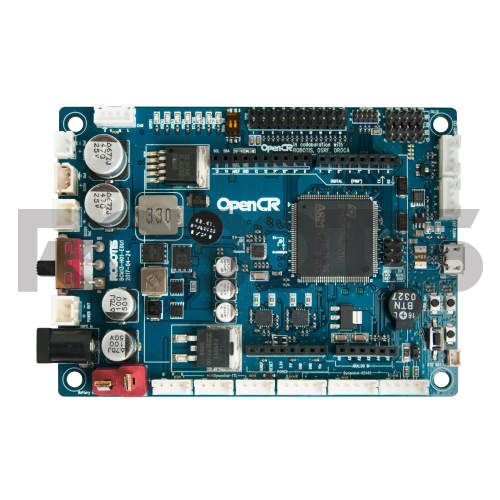
OpenCR1.0
OpenCR1.0(ROS用オープンソース制御モジュール)は、ARM Cortex-M7シリーズの強力なMCUを搭載したオープンソースのロボットコントローラです。
ハードウェア、ソフトウェア、回路図、PCB Gerber、BOM、ファームウェアのソースコードなど、OpenCR1.0に関するすべての情報は公開されており、誰でも利用可能です。OpenCR1.0は公式ROS教育プラットフォームであるTurtleBot3のメインコントローラとして採用されています。
- DYNAMIXELを制御するためのRS-485およびTTLをサポート。UART、CANなど多様な通信インターフェースを提供。
- Arduino IDEなどの開発ツールに対応。
- SBC(シングルボードコンピュータ)などのホストコントローラと組み合わせることで、より強力に動作。
- ROSをベースとした各種専用リソースを提供し、ROSと併用することでOpenCR1.0の機能を最大限に活用可能。
| Package Components | Qty |
|---|---|
| OpenCR1.0 | 1 |
| USB Micro B Cable | 1 |
H/W Specifications
| H/W Specifications | |
|---|---|
| Microcontroller | STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS) |
| Sensors | Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis (MPU9250) |
| Programmer |
ARM Cortex 10pin JTAG/SWD connector USB Device Firmware Upgrade (DFU) Serial |
| Extension pins |
32 pins (L 14, R 18) *Arduino connectivity Sensor module x 4 pins Extension connector x 18 pins |
| Communication circuits |
USB (Micro-B USB connector/USB 2.0/Host/Peripheral/OTG) TTL (B3B-EH-A / Dynamixel) RS485 (B4B-EH-A / Dynamixel) UART x 2 (20010WS-04) CAN (20010WS-04) |
| LEDs and buttons |
LD2 (red/green) : USB communication User LED x 4 : LD3 (red), LD4 (green), LD5 (blue) User button x 2 |
| Powers |
External input source 5 V (USB VBUS), 5-24 V (Battery or SMPS) Default battery : LI-PO 11.1V 1,800mAh 19.98Wh Default SMPS : 12V 5A External output source 12V@1A(SMW250-02), 5V@4A(5267-02A), 3.3V@800mA(20010WS-02) External battery Port for RTC (Real Time Clock) (Molex 53047-0210) Power LED: LD1 (red, 3.3 V power on) Reset button x 1 (for power reset of board) Power on/off switch x 1 |
| Dimensions | 105(W) X 75(D) mm |
| Mass | 60g |
Diagram

対応製品
- DYNAMIXEL Xシリーズ
- DYNAMIXEL AX/MXシリーズ(Molex–JST 変換ケーブルが必要)
- DYNAMIXEL Pシリーズ(Molex–JST 変換ケーブルが必要)
- ROBOTIS センサー製品